Vtrus Inc
I was the CEO and co-founder of Vtrus Inc from 2017-2020, a robotics startup from Seattle WA developing autonomous drones for indoor inspection. We raised $3M seed round, got nominated for Best Hardware Innovation on Geekwire and won a Techcrunch Disrupt Startup Battlefield award. Our Series-A coincided with COVID and our team got absorbed by our corporate investor Fuji, who is now incorporating the tech into warehouse robots.
I'm grateful for the opportunity to work alongside my talented co-founders Jonathan Lenoff (now at Cruise) and Carlos R. Sanchez (now at Amazon Robotics), as well as our early employees Jeston Furqueron (now at Fuji), Dr. Grady Williams (Georgia Tech, now at Overland AI), Dr. Dongjiang Xu (now at Omega Medical Imaging), Yande Liu (Penn State, Autel) and Nikhil Baheti (CMU)
Drone and Base Station
The Vtrus drone will take-off from its base station, autonomously inspect an industrial environment with embedded 3D mapping and localization routines and return to base to self-charge.

Surround-View Visual-Inertial Localization
We built a custom capture board where 6x global shutter cameras were time-synchronized with an IMU to perform visual-inertial Simultaneous Localization and Mapping (SLAM).
What I did
- Provided detailed technical specification of the sensor rig to manufacturing partner
- Engineered the custom SLAM solution
- Optimized software for the embedded Nvidia TX2 platform
3D Mapping
With a technique known as Voxel-Hashing, we were able to 3D map large indoor spaces. This worked similar to paged-memory where a background process only loads in-frustum voxels to the GPU and saves the rest to disk.
What I did
- Carefully wrote the Voxel Hashing algorithm, including visual debugging tools


GPU-accelerated MPPI Controller
Our lead robotics scientist Dr. Grady Williams wrote his novel Model-Predictive-Path-Integral (MPPI) controller that samples thousands of possible paths the drone can take and chooses the best one in order to avoid obstacles and reach goal targets.
What I did
- Provided guidance
- Interfaced the SLAM module with the MPPI module
Simulation Tool for Testing & Debugging
Our lead software engineer Jeston Furqueron wrote a very versatile simulation tool to help design flight plans and simulate them. This help to assess flight-time and range.
What I did
- Provided guidance
- Interfaced the SLAM module with simulation tool

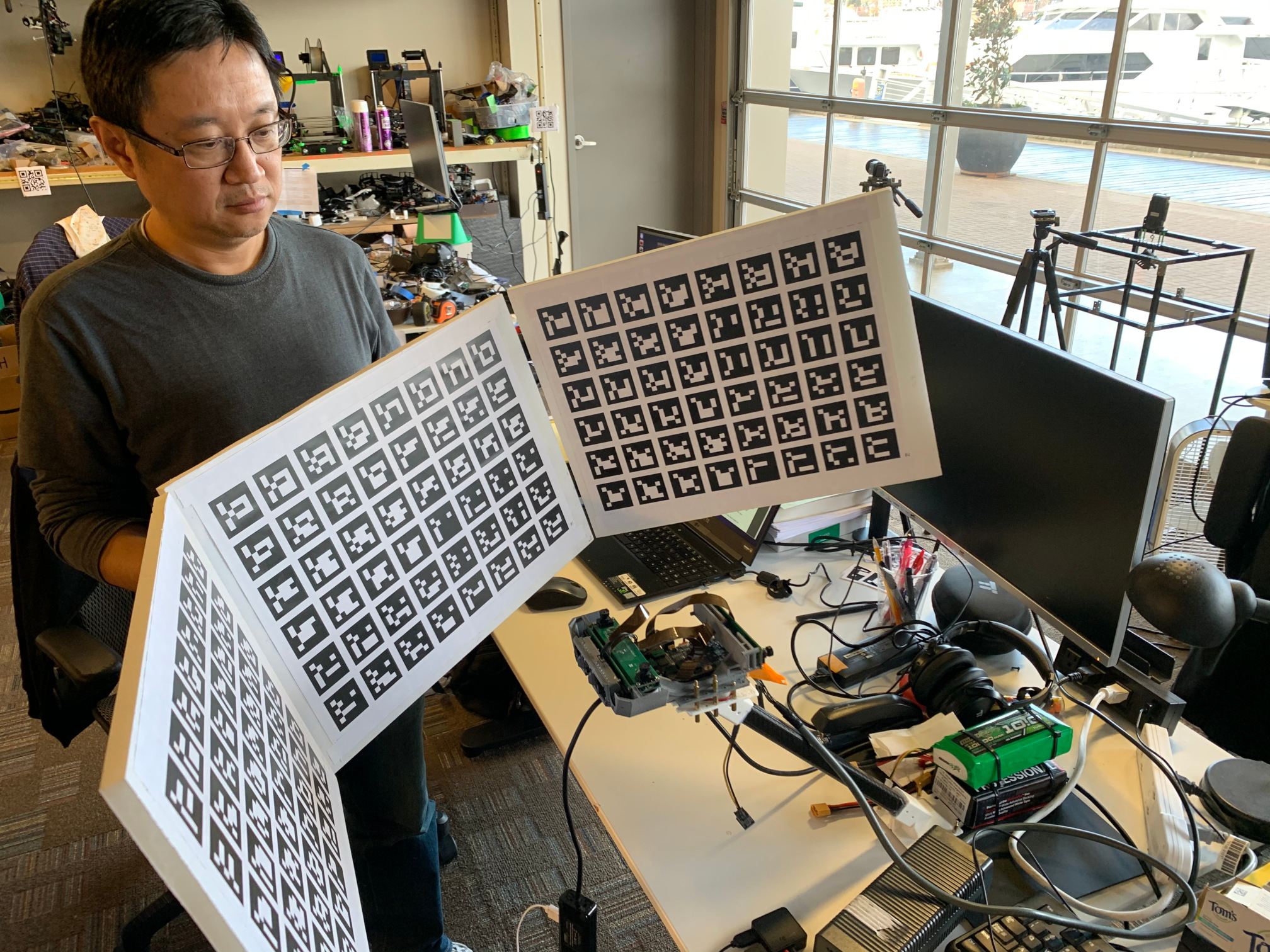
Multi-camera calibration
Together with our lead computer vision engineer Dr. Dongjiang Xu we built this triple plane target to quickly calibrate our surround view camera suite consiting of 4 stereo pairs.
What I did
- Provided guidance
- Debugged and performance improvements to sub-pixel accuracy